RG3
Robot bipede by Stefano.

Descrizione
Unità controllo attuatore
La scheda di controllo degli attuatori di RG3 si compone di due parti: la parte digitale di controllo e la parte di pilotaggio motore mediante ponte ad H. Possono essere alimentati assieme o separatamente fino a 24 Volts. La tensione digitale è poi portata a 5V mediante un regolatore 78m05. Il consumo a vuoto è di circa 35 mA.
Il controllore impiegato è un ADuC848 dotato di CPU 8051 a 12.58 Mhz e istruzioni a 1 ciclo di clock. Oltre alle periferiche standard: 1UART, 1 SPI, 2 PWM etc dispone di un convertitore sigma delta a 16/24 bits. Il convertitore, benchè di precisione, rappresenta il più grosso limite della scheda in quanto molto lento; per ottenere almeno 10 bits stabili richiede un tempo di conversione di circa 4 msec. E’ quindi necessario sincronizzare opportunamente i campionamenti su vari ingressi come vedremo più avanti.
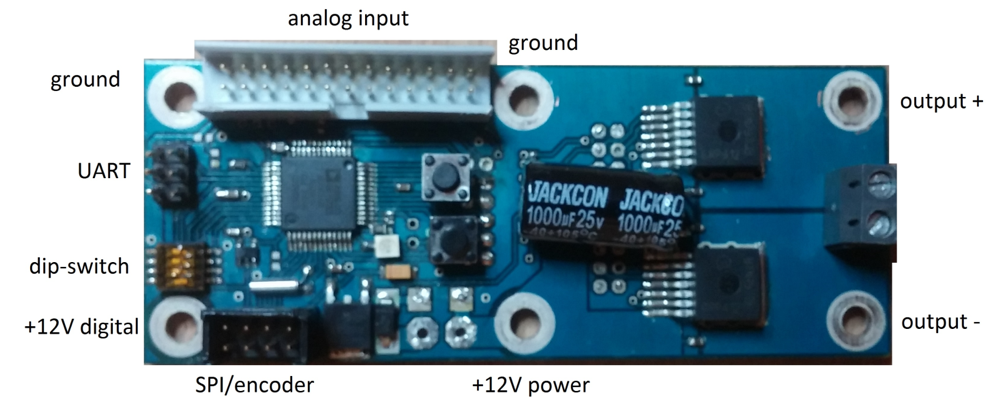
La scheda dispone di vari connettori: il connettore a 26 pin è dedicato essenzialmente agli ingressi analogici: Il range di tensione va da 0 a 1.25 V ma consente anche ingressi differenziali. Il primo input A1 è connesso internamente al sensore di corrente assorbita.
 Disegno connettore 26 pin?
Disegno connettore 26 pin?
Il connettore a 6 pin è dedicato alla porta seriale TTL 5V. Un pin è anche connesso all’alimentazione digitale. Il connettore a 8 pin può essere utilizzato alternativamente come porta SPI o come ingresso per encoder.
E’ presente un dip-switch a 4 bits per impostare fino a 16 indirizzi diversi alla scheda.
L’alimentazione principale è fornita tramite i fori da 4mm di diametro della scheda così come l’output al motore. Nella parte di potenza sono presenti due integrati BTN8960 half bridge così da realizzare un ponte ad H completo in grado di reggere fino a 45-50 A continui e fino a 90 A di picco. Oltre a garantire internamente dead time e protezioni da over current e over temperature presenta una uscita in corrente proporzionale alla corrente che fluisce nei MOS di potenza. Una resistenza trasforma la corrente in tensione presente sull’ingresso A1 del convertitore AD.
Due pulsantini centrali sono utilizzati per pilotare manualmente il motore.
Protocollo di comunicazione scheda attuatore <-> PYBOARD
Viene utilizzate una connessione seriale TTL a 5V 115200,8,0,1. Una scheda pyboard è master e trasmette contemporaneamente a tutte le schede collegate in parallelo (8). Naturalmente solo una alla volta può rispondere essendo tutte le uscite TX pullup connesse assieme.
Ogni messaggio inizia sempre da parte della pyboard con un 2 bytes che contengono l’indirizzo della scheda seguito da un byte che contiene il comando eventualmente seguito da altri byte di dati.
Poiché il convertitore AD impiega circa 4 msec a completare il campionamento di un ingresso ed allo stato attuale vengono misurati 3 ingressi (posizione, corrente, ausiliario) il tempo totale di un ciclo è di circa 12msec.